無人機變形監測解決方案
一、工程背景
隨著國民經濟的發展,我國基礎設施建設正進入飛速發展時期,在各種基礎建設過程及后期運行中,為了解其運行狀態,均需要對其進行變形監測。
常規變形監測主要有點式監測和面狀監測。點式監測即建造觀測墩,通過測量離散點的變形代替整體變形,這種方式測量結果精確、變形部位表達明確,但存在野外工作勞動強度大、周期長且耗時耗力、連續性不足、細節性缺乏和接觸式不便等缺點。面狀監測主要有近景攝影測量法、地面三維激光掃描法和地基SAR干涉測量法等。近景攝影測量法成本低,但由于各基礎設施表面紋理不足,容易受到距離和環境的限制,難獲得較好的精度和較全面的信息。地面三維激光掃描法和地基SAR干涉測量法雖然測量結果精度較高,但由于設備附件多,價格昂貴,運輸、安裝和遷站困難,也難以在大型基礎設施工程中實施。
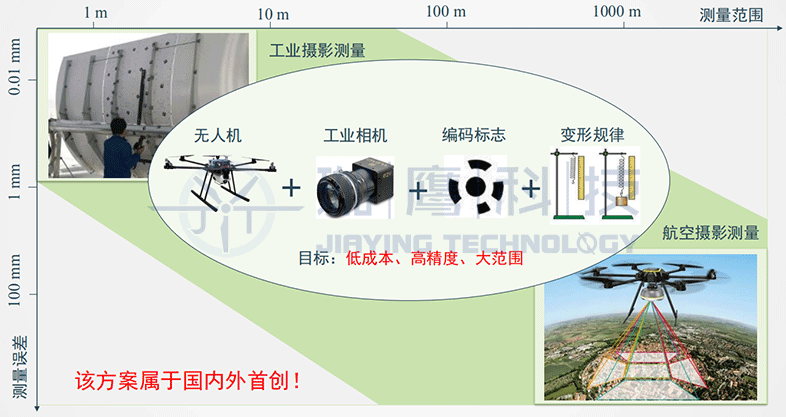
因此,為了提高大型基礎設施變形監測的可實施性、經濟性、高效性和精確性,本公司研發出一套移動式、低成本、高精度的邊坡變形監測系統—基于無人機的高精度變形監測系統。該系統以低成本、高精度、移動式測量為核心目標,融合無人機的自主導航技術、圖像識別算法和亞像素定位技術,可以實現對全場三維變形的毫米級測量。
二、系統方案
結合無人機及工業攝影測量技術的優勢,在地面布設反光標志點,無人機搭載高質量工業相機,依據規劃航線自主飛行,自動采集圖像數據,通過圖像處理算法,最終實現較大范圍的高精度變形測量,精度可達2mm。
三、技術原理
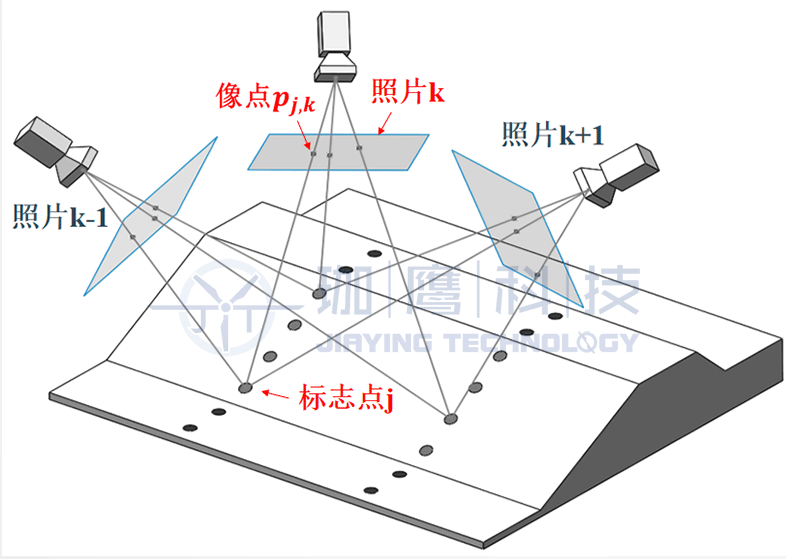
- (1)拍攝一系列具有一定重疊度的照片
- (2)根據同一標志點在多張照片上的成像,恢復它的三維信息
- (3)通過變形前后標志點的三維信息得到位移量
四、系統優勢
該系統即能體現移動攝影測量的低成本、高效性和靈活性,又具有較高的測量精度,能夠同時滿足邊坡變形監測的可實施性、高效性和精確性。系統特色和優勢主要體現在以下三個方面:
- (1)自動化:無人機依航線飛行,數據采集自動化,數據處理自動化;
- (2)成本低:標志點成本低,無人機和軟件算法等都可以共享;
- (3)精度高:標志點圓心定位精度為亞像素級,變形測量精度達 2 mm;
五、技術實現
1)數據采集
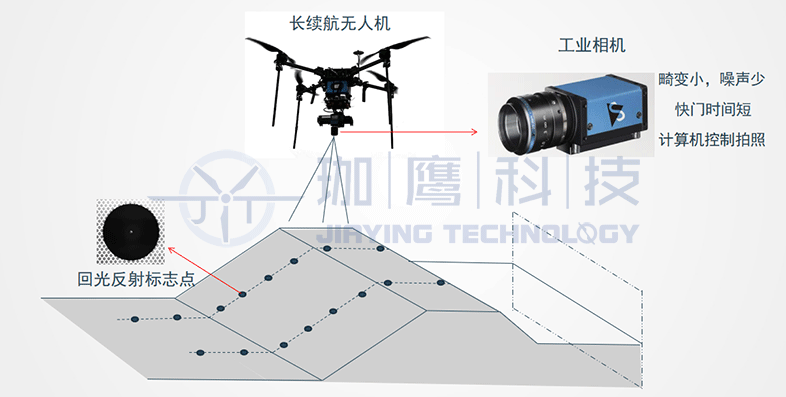
- (1)自主研發無人機系統,續航時間40分鐘以上;
- (2)搭載高質量工業相機:噪聲少、畸變小、快門時間短;
- (3)航線預先規劃,一鍵起飛,自動采集圖像數據;
2)數據處理
- (1)自主開發圖像算法軟件,自動輸出變形測量結果;
- (2)實現照片中標志點的精確識別及亞像素級定位;
- (3)從一系列二維相干照片中求解標準點的三維坐標;
- (4)基于變形模式約束的光束平差算法優化標志點三維變形量;
六、應用案例
該技術在南水北調中線工程河南段膨脹土邊坡變形監測中已經開展示范性應用,與水準測量結果相比偏差小于2mm。

無人機現場飛行照片
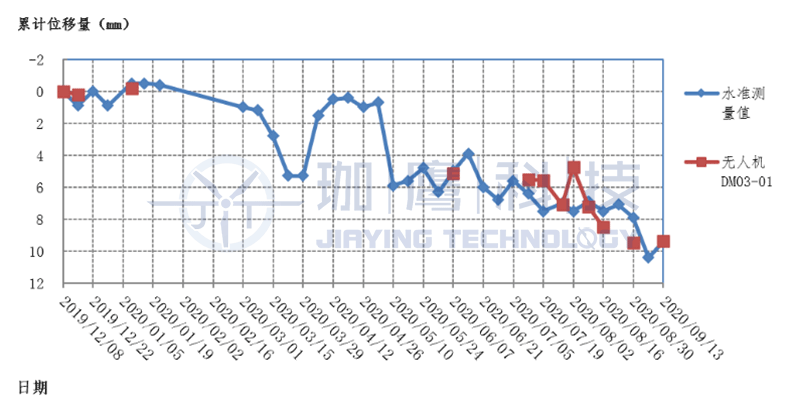
與水準監測沉降變形結果比對
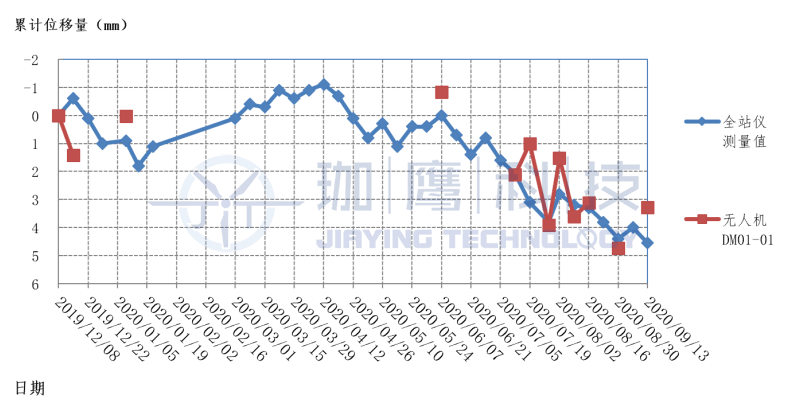
與水準監測水平變形結果比對